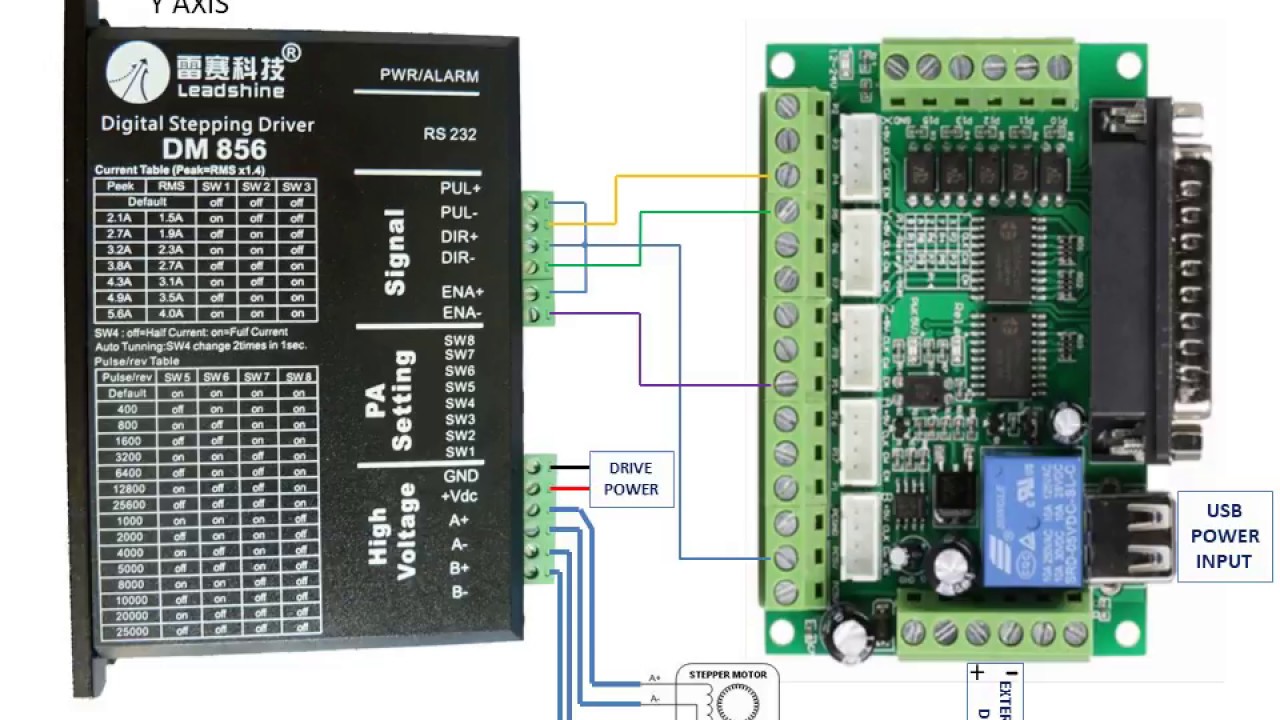
In default high level npn control. Wire inputports a phase ared motor phase a 2 a phase a blue 3 phase bb green motor phase b 4 phase bb black 5 power input ports vcc input power ac24v 70v 6 gnd dc30v 100v input power.
Arduino Rotary Table For Dummies Page 17 Home Model
Hbs860h wiring diagram.
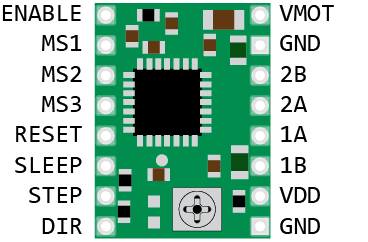
This signal is used for enablingdisabling the driver.
Atc spindle part 1.
54 connections to 232 serial communicationinterface pin1 pin6 pin6 pin1 crystal head definition remark foot transmit data receive data power supply to hisu power ground 55 sequence chart of controlsignals in order to avoid some fault operations and deviations pul dir and ena should abide by some rules shown as following diagram.
Please note that rotation direction is also related to motor driver wiring match.
Open loop stepper motor driver hbs860h vs.
That rotation direction is also related to motor driver wiring match.
4 5v when dir high 0 05v when dir low.
Wiring programming and testing the hitachi wj200 vfd duration.
Exchanging the connection of two wires for a coil to the driver will reverse motion direction.
The direction signals polarity is software configurable.
Hbs86h leadshine nema34 2phase closed loop motor hybrid servo drive 24 75vac.
For reliable motion response dir signal should be ahead of pul signal by 5µs at least.
In double pulse mode software configurable this signal is counter clock ccw pulse active both at high level and low level.
4 dir i 5 ena i enable signal.
Gallery of Hbs860h Wiring Diagram
Download Now
Centroid Acorn Cnc Basics Wiring A Kl 5080h Closed Loop Stepper From Automation Technologies
Download Now
5 Axis Breakout Board Driver Wiring Example
Download Now
12nm Nema 34 Dsp Closed Loop Stepper Drive Motor Ac60v With
Download Now
Adafruit 16 Channel 12 Bit Pwm Servo Driver I2c Interface
Download Now
Us 128 25 5 Off Nema34 8 5nm Cnc Closed Loop Stepper Drive Amp Motor Hbs860h 86hbs85 Dc Closed Loop Stepper Motor 86hb Step Motor 8 5n M Step
Download Now
7i76 Wiring Diagrams Linuxcnc
Download Now
Us 402 8 5 Off 3pcs L 12nm Nema34 86mm Ac Dc Dsp Closed Loop Stepper Motor Driver 400w 60v Dc Power Supply Hybird Encoder Easy Step Servo
Download Now
Nch02 Stepper Motor Usb 5 Axis Control Card 24v Switching
Download Now
Nema17 Cnc Stepper Motor 40mm 58 Oz In 1 3a Cnc Stepper
Download Now
2020 12nm Nema34 Ac60v Dsp Closed Loop Stepper Drive Motor For Cnc Engraving From Cncwilliam 202 02 Dhgate Com
Download Now
100pcs 6 5 8 Mm Two Phase Four Wire Micro Stepper
Download Now
Dmm Electronic Enclosure By Cnc4xr7
Download Now
Hbs860h Hybrid Stepper Drive Connecting Alarm Signal To Centroid Acorn
Download Now
Arduino Rotary Table For Dummies Page 17 Home Model
Download Now
Servo Motor Stepper Motor Get The Best Deals Now Top 100
Download Now
Stepper Motor With A4988 And Arduino Tutorial 4 Examples
Download Now
Us 392 0 Eu Free Cnc Longs 3 Axis Nema 34 Stepper Motor 34hs1456 5 6a 1232oz Amp Driver Dm860a Controller 7 8a 256micro Cnc Router Kit Nema 34 Nema 34
Download Now
Cnc Closed Loop Hybrid Hss86 Electronics Part2
Download Now
Hot Price 8bc0 3n M 60 Nema 24 Closed Loop Stepper Motor